Papers
|
|
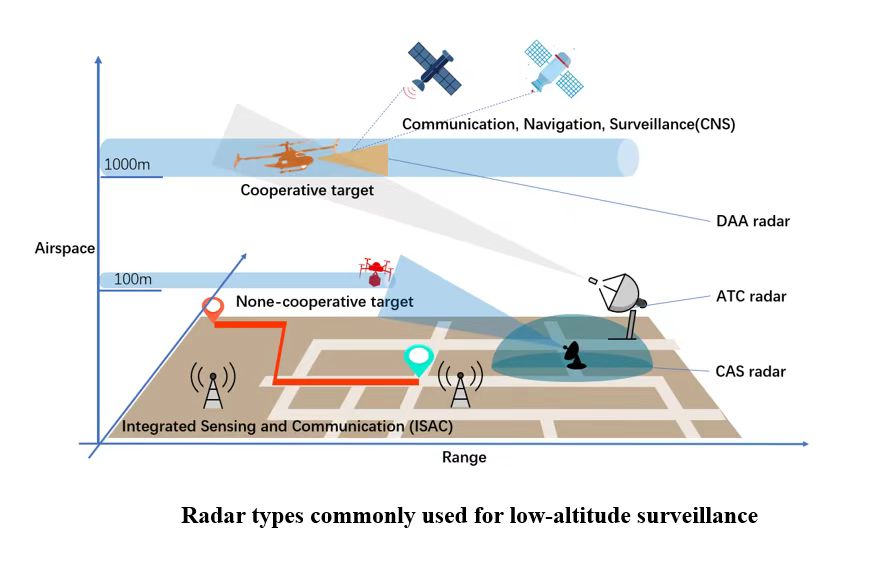
Integrated Tracking-Free Automatic Target Recognition (ATR) Radar Methodology for Real-Time Low-Altitude Airspace Management in China's Low-Altitude Economy
|
Jiangkun Gong
Wuhan University |
|
|
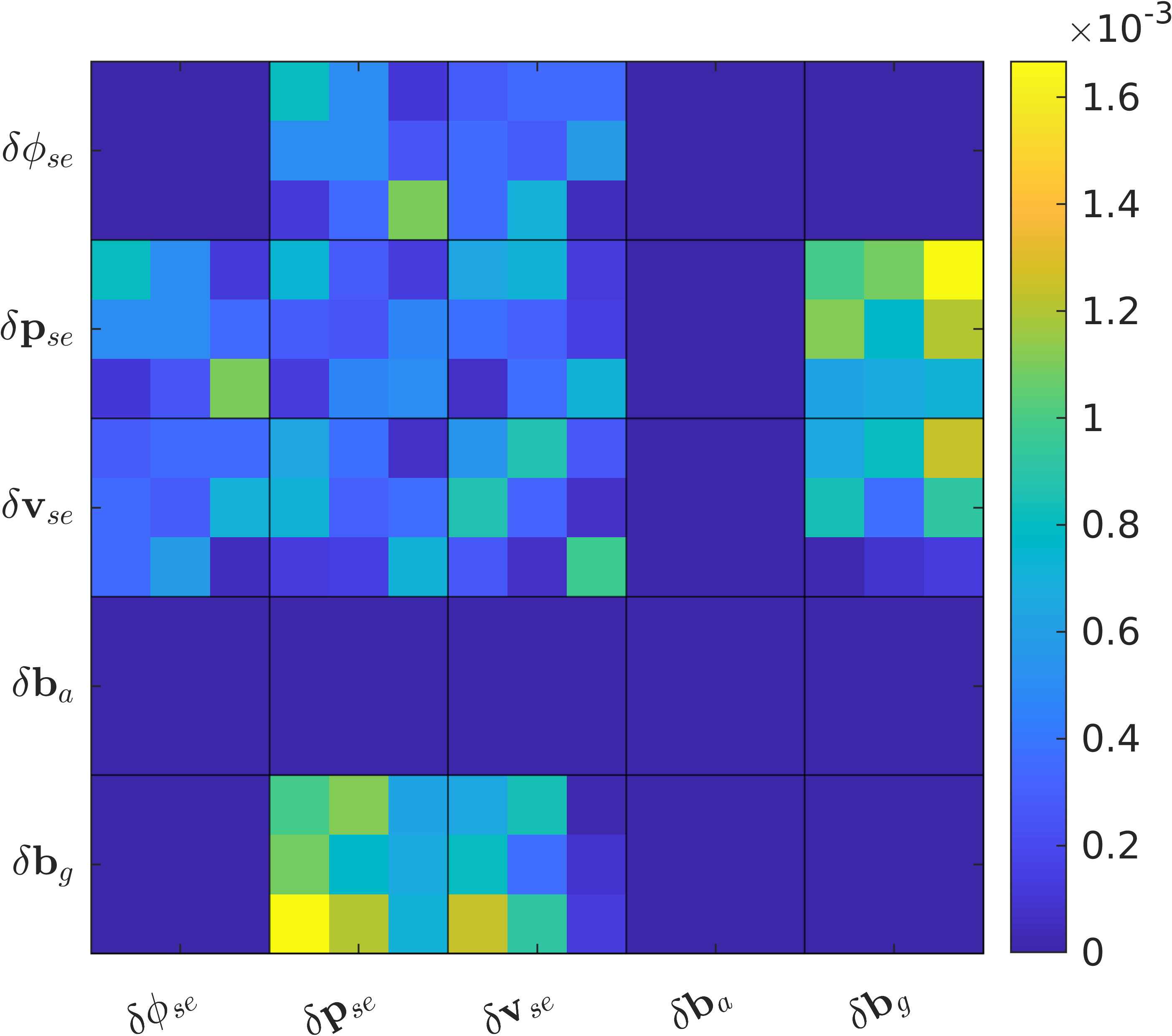
IMU Propagation as Preintegration
|
Jianzhu Huai
Wuhan University |
|
|
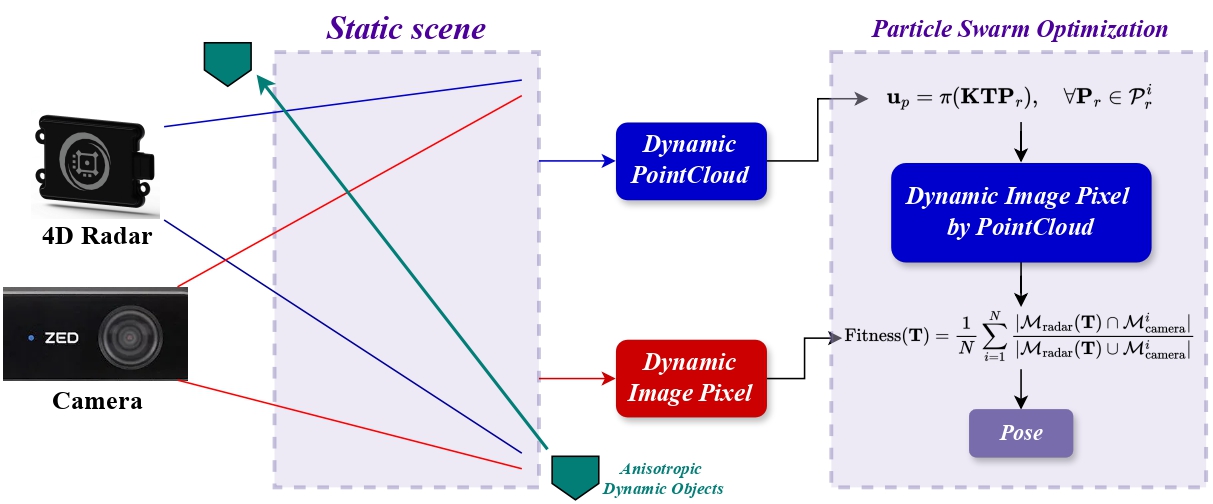
Heuristic-Guided Extrinsic Calibration for 4D Radar-Camera Systems Using Dynamic Objects
|
Hang Zhen, Ronghe Jin, Zhi Gao
Wuhan University |
|
|
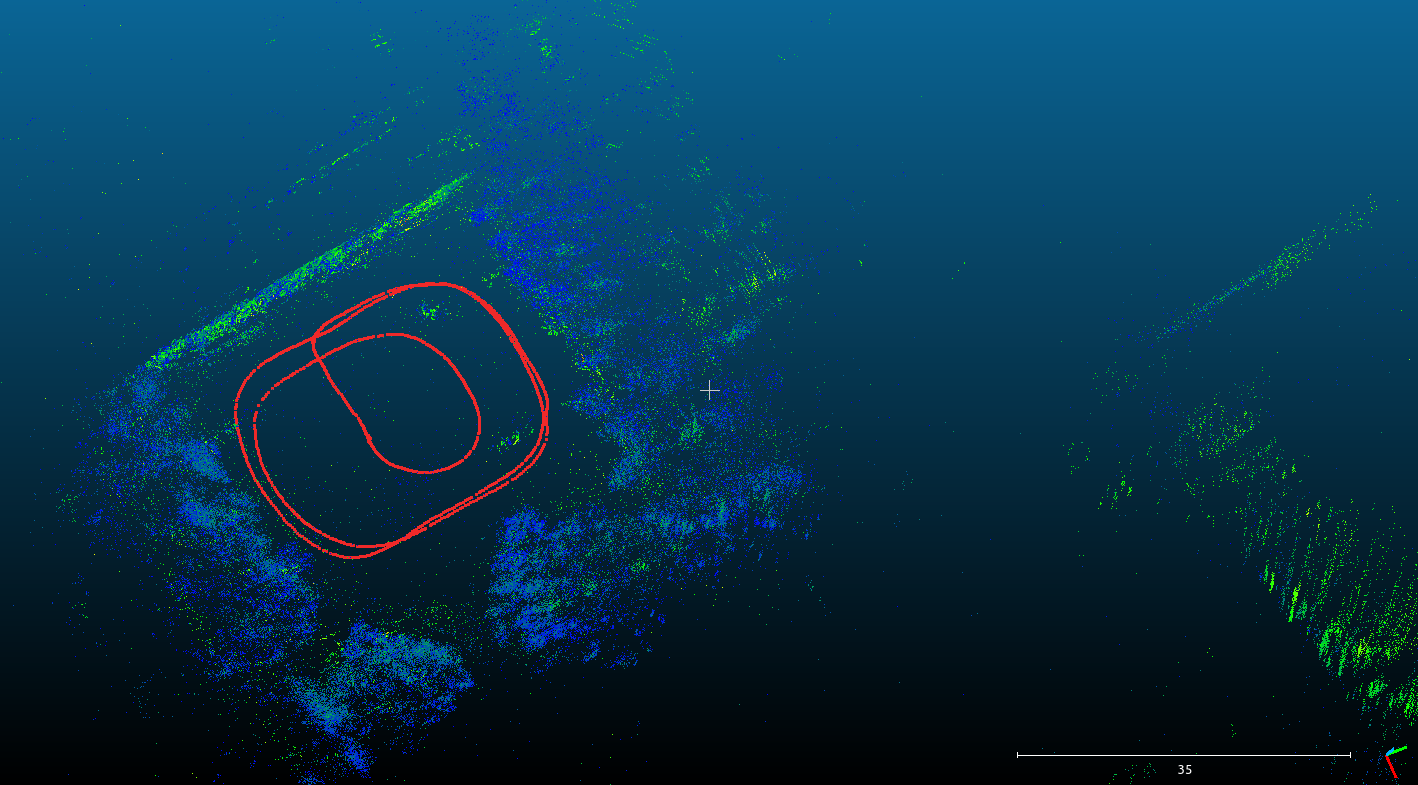
Bundle Adjustment for 4D Radar Mapping
|
Jianzhu Huai, Yiwen Chen, Binliang Wang
Wuhan University |
|
|
Radar-Centric Sensor Fusion for Robust Indoor SLAM in Complex Environments
|
Binliang Wang, Jianzhu Huai
Wuhan University |
|
|
LiDAR–Radar–IMU Fusion for Multi-Robot SLAM in Adverse Environments
|
Yiwen Chen, Jianzhu Huai
Wuhan University |
|
|
A Multi-Platform robust SLAM Framework based on Millimeter-wave Radar-Inertial Fusion in Harsh Environments
|
Fangcheng Qu, Yuheng Zhang, Xianlang Wei, Youchen Tang, Jian Zhou
Wuhan University |
|
|
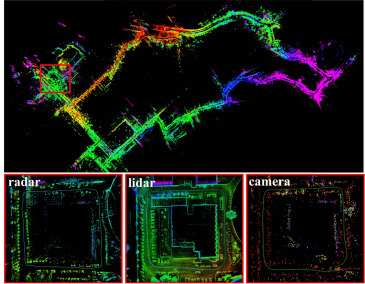
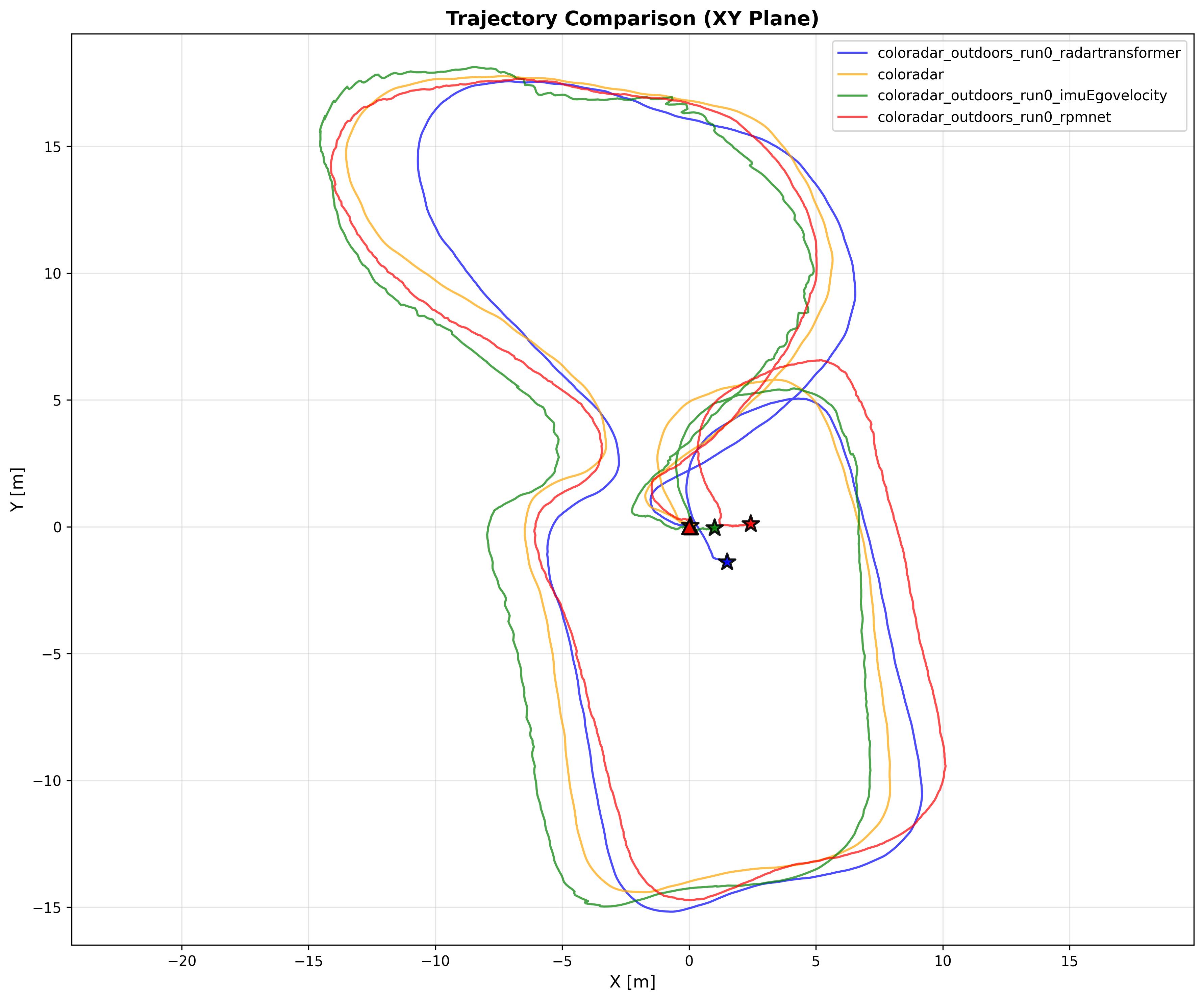
Deep Point Matching for 4D Radar Odometry
|
Yi Liu, Jianzhu Huai, Lin Zhao
National University of Singapore |